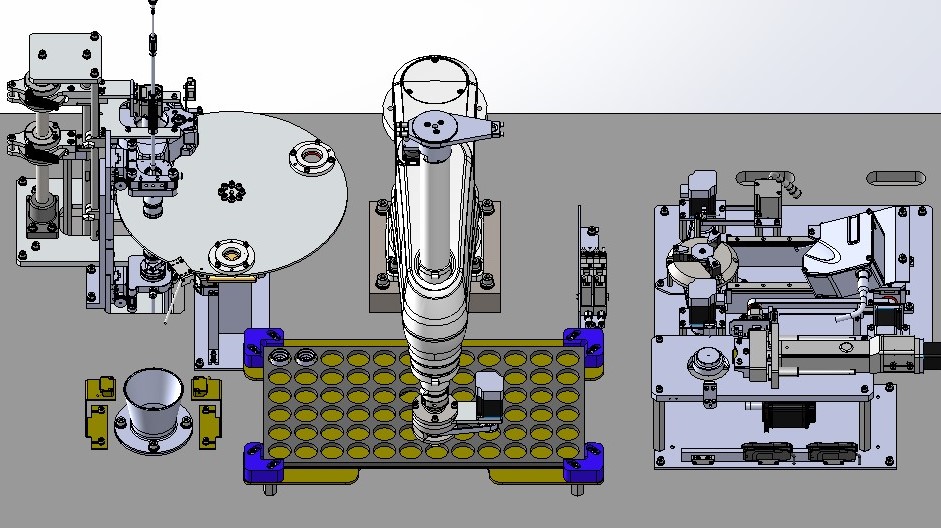
システム構成の流れ
搬送、検査、判定、記録を一連の流れとして構成し、現場で扱いやすいシステムにまとめます。
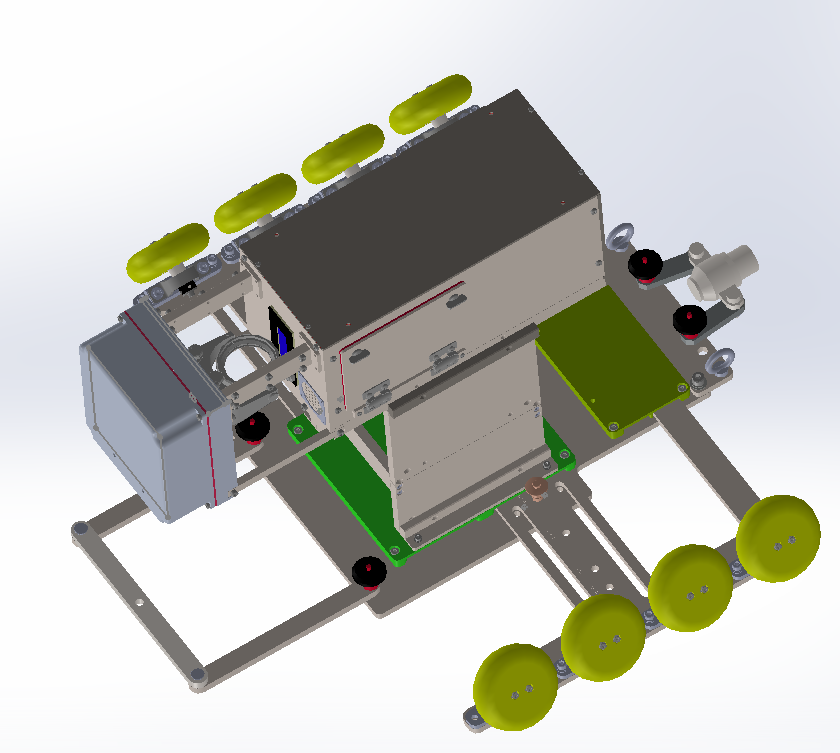
ワーク搬送
ロボットでワークを受け取り、検査位置まで安定して搬送します。
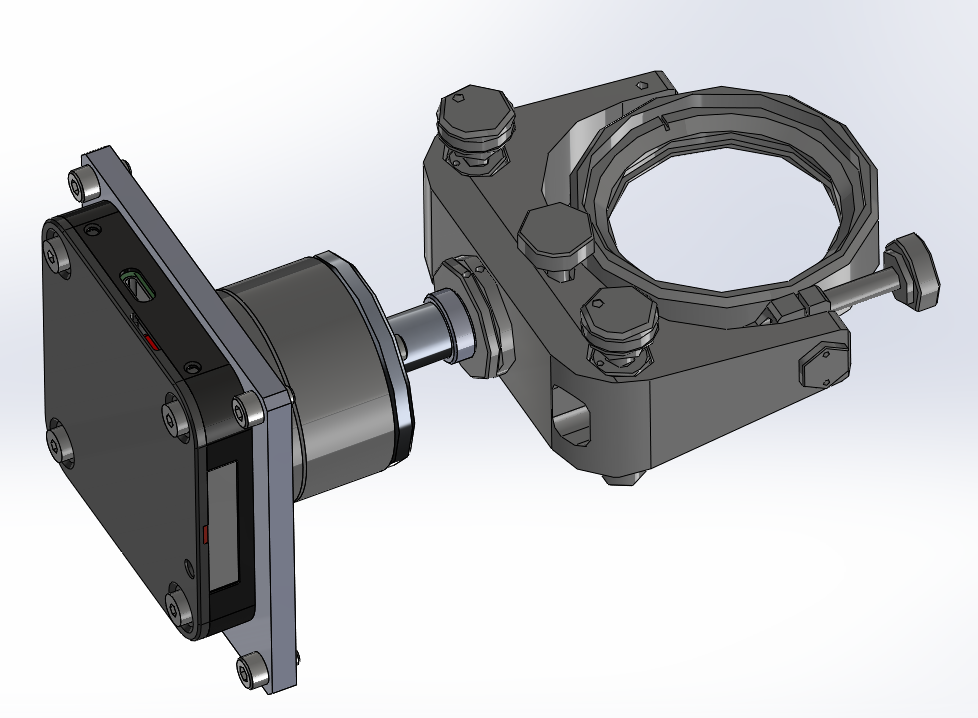
位置決め・検査
治具、カメラ、レーザー変位計を組み合わせて必要な確認を行います。
判定処理
検査結果をPC側で整理し、判定条件に応じた処理へつなげます。
履歴管理
検査データの蓄積や検索を行い、データベース化にも対応します。